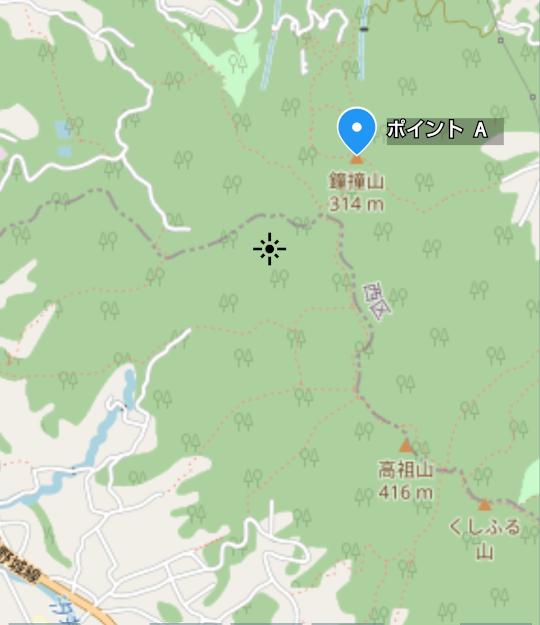


目視できるがその位置が良くわからない物(以下これをターゲットと呼びます)の位置を推測する方法を示します。
(ただし、この方法ではターゲットがあまり動かないことが前提となります。一定の時間、動かないUFOであれば、この方法で位置が推測できるかもしれません。)
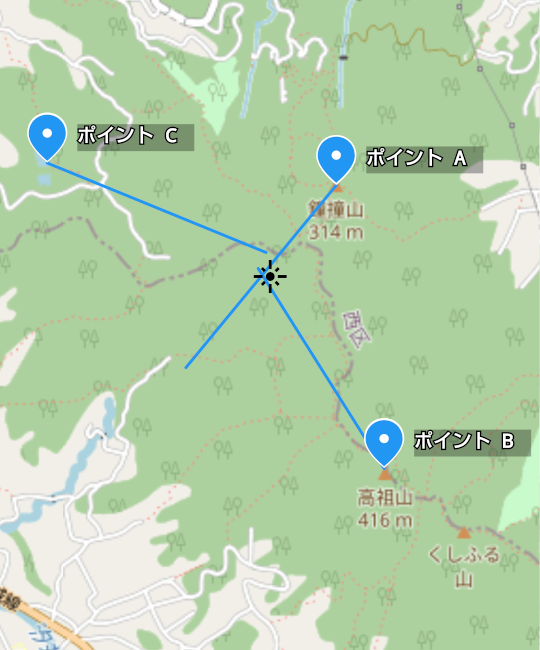
ウェイポイントからの方位線が重なるようになると、方位線で囲まれた三角形が現れます。
ターゲットの位置は、この三角形の中である可能性が高いと判断することができます。
もし、測定箇所が2箇所以下の場合は三角形ができないので、ターゲットの位置として得られた情報の誤差がどれくらいあるのか判断できません。できれば3箇所以上で測定してください。